Gallery
Visual documentation of design and development.




Technologies
Tools and software utilized throughout the project.
Project Details
Comprehensive information and technical specifications.
University of Moratuwa, Sri Lanka
Overview
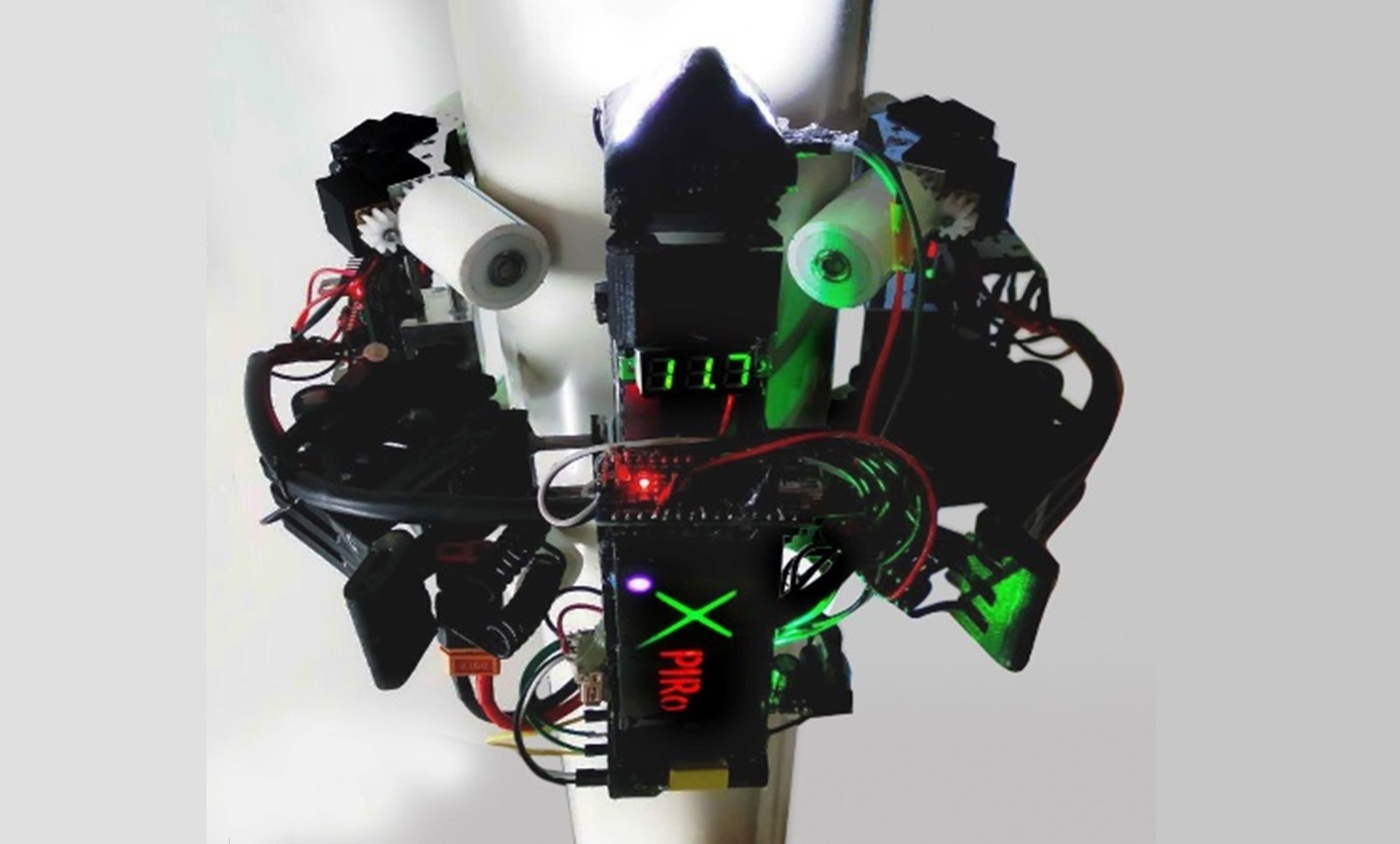
ExPiRo (External Pipeline Robot) is a novel wheeled robot designed for inspection and monitoring of pipeline systems. The robot features a passive pipe clutching mechanism that enables it to travel on linear pipe segments with variable diameters ranging from 100 mm to 130 mm, both horizontally and vertically. This capability allows continuous inspection without requiring pipeline shutdowns, making it ideal for operational environments.
Key Features
- Adaptive Gripping: Passive clutching mechanism using two parallelogram four-bar linkages that automatically adjust to varying pipe diameters (100-130 mm)
- Wheeled Locomotion: Eight individually powered DC motors driving rollers for smooth axial motion along curved pipe surfaces
- Payload Capacity: Can carry up to 2.2 kg of inspection equipment (cameras, sonar scanners, sensors)
- Vertical Crawling: Maintains grip on vertical pipe segments without power consumption when stationary
- Compact Design: Final prototype weighs only 800g, powered by 12V LiPo battery
Mechanical Design
The clutching mechanism uses torsion springs (k = 0.893 Nm/rad) to maintain constant normal force against the pipe surface. The parallel four-bar linkages passively adjust to diameter variations while two roller units (four rollers each) provide reliable grip. Structural analysis confirmed all aluminum 6063 alloy links operate within safe stress limits (max 219.88 MPa).
Control System
A PID-based position control system enables precise navigation to target locations within the pipeline network. ADAMS-MATLAB co-simulation validated the controller's performance across goal positions from 200 mm to 1000 mm, achieving:
- Less than 0.1% overshoot across all test distances
- Settling times ranging from 4.49s to 6.02s
- Adjustable acceleration profiles (13-25 m/s²) via gain tuning
- Dead reckoning localization using shaft encoders on rollers
Electronics & Control
Custom PCB design featuring dual L298N H-bridges and ATMEL ATmega698N microcontroller for motor control. Eight-channel RF control system (Microzone MC8B transmitter and MC8RE receiver) provides remote operation capabilities. PWM speed control ensures synchronized roller operation.
Testing & Validation
The prototype successfully demonstrated ability to traverse uneven pipe segments with diameter variations from 110 mm to 125 mm. The passive gripping mechanism adapted smoothly to diameter changes while maintaining stable vertical and horizontal motion. Testing validated the scalability of the design for different diameter ranges.
Research Publication
This work was conducted at the College of Mechanical and Electronic Engineering, Shandong University of Science and Technology (China) in collaboration with the Department of Mechanical Engineering, University of Moratuwa (Sri Lanka). The research has been documented in a technical paper presented at an international conference.
“Design and Development of a Novel External Pipe Crawling Robot ExPiRo” — C. Jayasundara, A. P. Mudugamuwa, K. N. M. Perera, Y. W. R. Amarasinghe, Han Baokun. 2020 5th International Conference on Robotics and Automation Engineering (ICRAE), IEEE Xplore, 2021.